Stephenson H, Lim A, Dupuy R, Brun S, Armstrong A, Okunola N, Li NA, Hilkens CMU, Novakovic K, Hills S, Ng KW, Al Musaimi O. Elastin-derived peptide hydrogels for sustained dermal delivery of tetrapeptide-21. Int J Pharm, 2026;689:126490. https://doi.org/10.1016/j.ijpharm.2025.126490
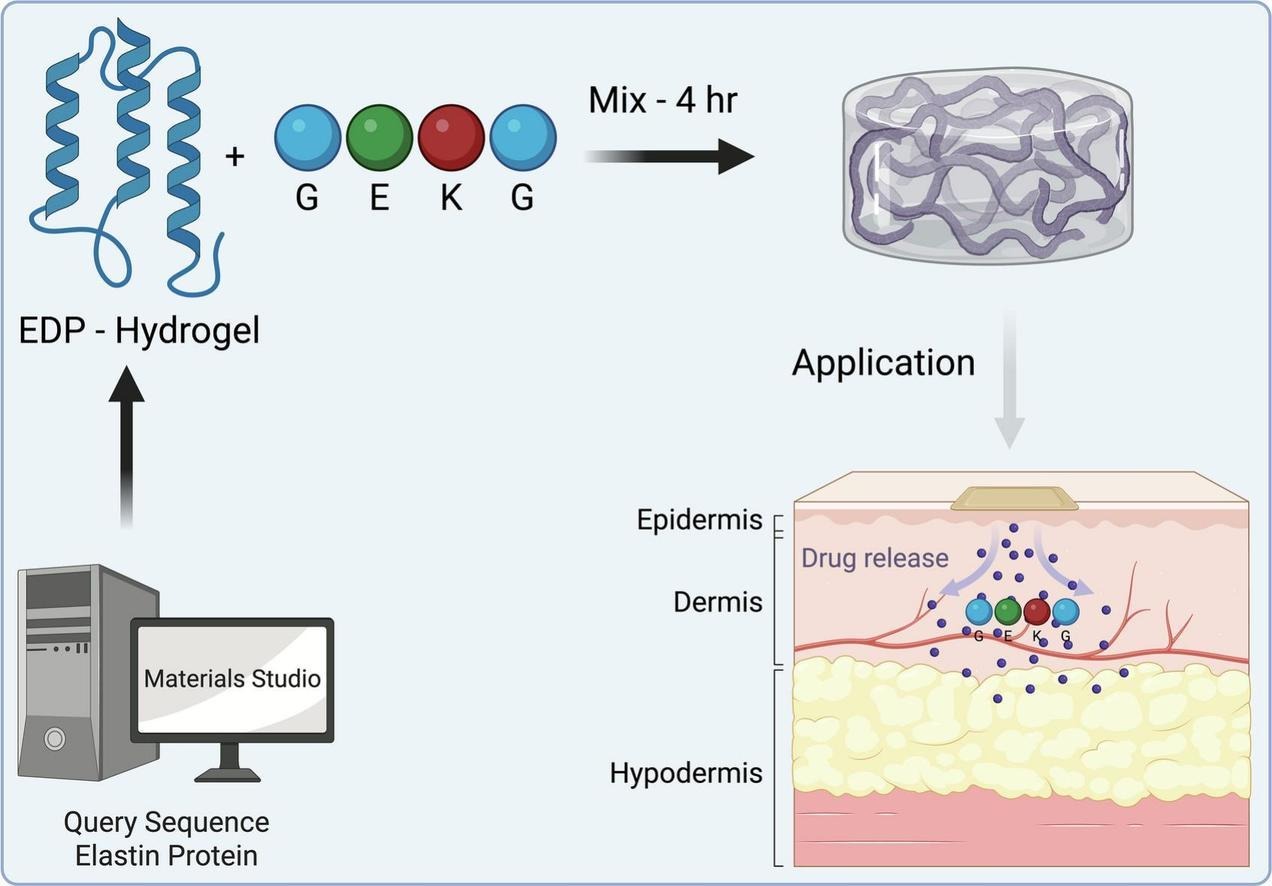
Last year, we published a paper with Othman and co-workers about a series of elastin-derived peptide (EDPs) capable of self-assembling into hydrogels. We envisaged that the hydrogels could be used to deliver drugs into the skin.
Our follow-on paper, published today, confirms that EDPs can indeed not only deliver drugs to the skin, but sustain their release.
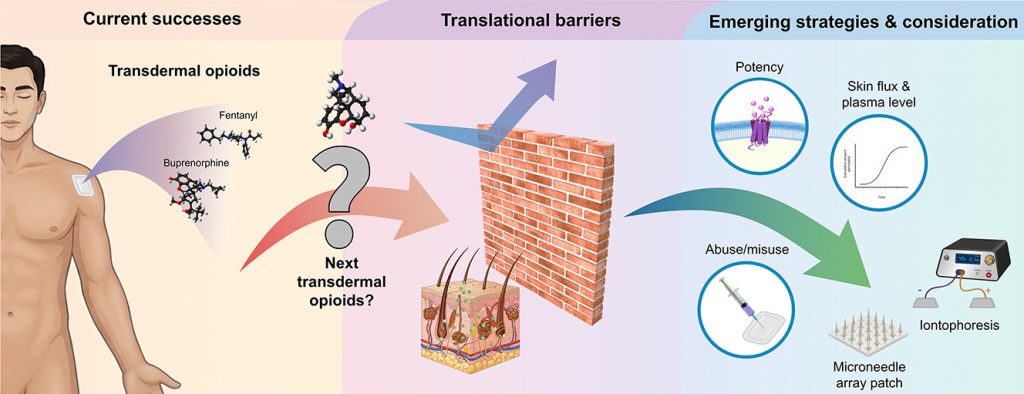
In this paper, we rationally designed and evaluated a series of self-assembling hydrogels made from synthetic peptides. These peptides have been derived from elastin, the natural protein that gives our skin its elasticity. We encapsulated tetrapeptide-21, a collagen-stimulating peptide, in the hydrogel and successfully delivered it across the skin, demonstrating sustained release for at least 72 hours in vitro.
Collagen production is, of course, critical to solving many skin-related problems, from wrinkle reduction to wound healing. We think this hydrogel technology will find great use in dermatology and aesthetic medicine.
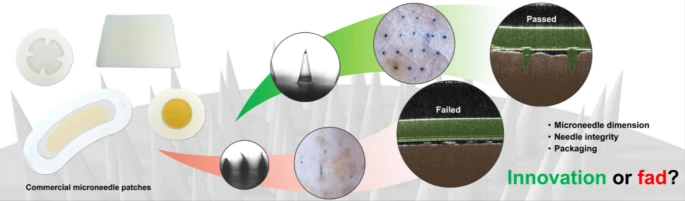
This is the first paper in which we have reported the skin-permeabilising effects of a fractional ablative laser and a motorised microneedle device, in collaboration with Lynton.
This is also the first paper where Franz diffusion cell (FDC) sampling in the skin permeation experiments was fully automated with Otto in a real-world experiment. Otto is an open-source FDC autosampler robot we have developed in-house from a cartesian 3D printer, some 3D-printed parts and common laboratory consumables. We have previously published its design files and validation data.
This has been a great collaboration with many colleagues. We are grateful for the opportunity to collaborate and thank everyone who has contributed to this work.
Featured image reproduced from Stephenson et al., 2025 under a CC BY 4.0 licence.